

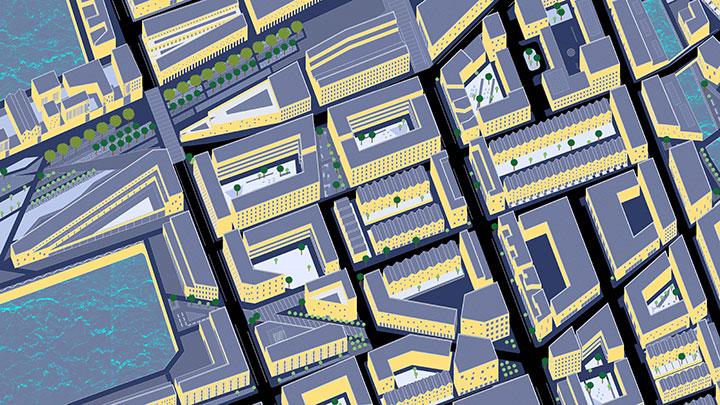


Public Realm for Autonomous Vehicles
In 2018 the BBC reported that Uber would halt self-driving car tests after a fatal accident. Ominously, the police highlighted that the pedestrian had not been using a designated crossing and they referred to the driver only as a “human monitor”. So after progressing towards shared space models, will pedestrians once again be fenced in for their own safety? Or might the sensitive calibration of vehicles to anticipate all potential collisions create gridlock? We worked with postgraduates at the University of Washington and the University of Manchester on what the implications might be for the public realm design.